Electrical engineers should understand the basic history of motors before specifying them in various applications
Learning Objectives
- Understand the typical types of motors: induction, synchronous, stepping, specialty.
- Learn the NEMA motor types and their main differences (A, B, C and D).
This overview of electric motors will start with some background on motors and move into a discussion of the types available, how NEMA classifies motors and what that means to electrical engineers. Electrical engineers should have this foundational knowledge before moving on in any building specification project.
What is a motor? Well, according to the dictionary, it has a couple of definitions. It’s basically a rotating machine that converts electrical energy into mechanical energy. We see them everywhere. They come in all sizes and shapes, different configurations, different ways to run them, different ways to control them.
A little history: In 1831, Michael Faraday figured out that when he moved a magnet around a coil of wire, he got a current in the coil. This was big stuff back in the day. And he practiced with that and fooled around with it for quite a while. And then he decided, “Hey, I’m going to put this on a wheel that I can spin and get a more useful result.” And I’d like to think that as he was doing this, he was thinking way ahead and saying, “I could run a steam engine to spin this thing for me and generate electricity.” And as such, he developed the first direct current generator sometimes referred to as a dynamo. Behind every good scientist is an assistant.
And lo and behold Faraday came out with his equation for electromagnetic force, which as you’ll recall from your electrical theory class, basically says, “The electromotive force around a closed path is equal to the negative of the time rate of change of the magnetic flux enclosing the path.”
And at the end of the day what that means is if you move a magnet around a coil or wire, you’ll get electricity. What he also discovered is that the frequency of the sine wave generated is a function of the speed and the number of poles of the magnet. When he started of course he only had two but that relationship stays with us. It got really exciting between the mid-1800s and late 1800s. Europe got on board. They got electrified. Thomas Edison electrified New York.
And if you really want some very interesting history, if you’re ever in Southern Michigan and visit Greenfield Village, you can see Edison’s original invention for generating electricity to provide lights all throughout New York. And lo and behold, George Westinghouse comes on board and he challenges Edison for the best way to proceed because Westinghouse was convinced and he had Tesla in his camp that we should use alternating current distribution instead of direct current distribution. Tesla showed that we can transform AC but we can’t transform DC. We can transfer our electricity much farther distances than Edison could with DC.
In the late 1800s, Westinghouse won that battle. And we went with AC distribution like we have right now. However, back then there were no standards. Prime movers were typically steam engines and they were wildly variable. Whatever anybody had is what they used. Reportedly in 1918, London had 10 different frequencies of alternating current power because a 2,000 rpm steam engine producing 133.33 Hertz power was very common. And remember at this point in time, the only thing we did with electricity was use it for lights. We didn’t really care about the frequency for the most part.
Again, across the pond, things were slightly different. Europe began at 40 Hertz but then someone discovered that the lights flickered enough that we could notice it. In the late 1800s, Europe standardized on 50 Hertz because 50 is metric-friendly and allegedly 60 is not a preferred number. And Southern California jumped on that bandwagon and they were originally at 50 Hertz. The United States for whatever reason standardized on 60 Hertz in 1948. This is how we got to where we are.
And remember at this point in time, all we’ve got is lights. In fact, if you look at the history that the Edison Power Company was really the Edison Lighting Company because that’s all they did was provide lights. We didn’t care about motors because it wasn’t until 1887 that Tesla came up with the first commercial induction motor. Two-phase current, phases are 90 degrees apart and we have a motor. Didn’t do a whole lot with that motor other than developed it. In 1889, Michael Dolivo-Dobrowolsky invented the 3-phase induction motor because we all know three is better than two. And his invention pretty much set the standard for AC motors moving forward.
Direct current versus alternating current
We have two types of motors we want to talk about actually two main classes of motors, direct current or alternating current. And they both have uses and they both have required choices. What DC motors typically do well is they have a much higher starting torque. They’re quick starting and stopping often used for stepping motors, control motors, things that require very precision movement. They’re very easy to reverse, switch the polarity on the leads and the motor typically runs backward. We can control their speed by adjusting their voltage, which is usually simpler and cheaper to control than an AC motor where we have to modify the frequency.
DC motors have been entrenched in the control space for a long time. For those of you familiar with mechanical actuators, they were pneumatic for many years and then they got replaced with high-torque, very precise DC motors for damper control, valve control and those types of things. In reality, we all know that DC motors have been in cars forever. The starting motor on your vehicle is DC. The motors that run the windows up and down is DC. If you have electric windshield wipers, it’s a DC motor. DC motors are very well entrenched in the automotive industry where they’re becoming more pronounced is the makers like Tesla or Nissan. The folks that are making electric cars are using them to drive the vehicle in ways that we never thought of before.
Also, as solar becomes more and more prevalent, we can use that DC directly in applications rather than transform it to AC depending on our application.
What do AC motors do very well? Well, first of all they’re very reliable. They’ve been around forever (since 1887) and they have been modified, adjusted, tweaked, fiddled with for all that time and they’ve been around and everybody knows them. They’re easy to maintain and do not have a lot of moving parts. It’s just the armature that spins around on some bearings. They have a very large installed base. They’re easy to find and they match the existing infrastructure because the infrastructure was sort of developed with the motor and the motor developed with the infrastructure and AC induction motors are kind of the thing. The issue — if you want to call it that — is we vary the speed with frequency and that is a little more complicated which is probably why variable frequency drives or closed control devices took so long to develop.
We’re going to really focus on AC motors because most of us are working in the commercial building space and even in industry and pump stations and water plants and wastewater plants, we’re still all going to be AC type motors. But even within that space there’s another divide. And that’s induction motors versus synchronous motors. All induction motors, which is what Tesla invented and what we’re most familiar with, are considered asynchronous. And what that means is the rotor current is induced by the stater current, hence the name induction motor. But because of that these motors will slip or they have a component called slip. Additionally, because of that slip and because of the way these motors run they operate at the lagging power factor.
Everyone remembers power factor. The power factor for the most part is OK, but it can be our enemy. The advantage to induction motors is they’re less expensive to manufacture and maintain. Because we’ve been manufacturing them for 200 years, we know how to do it. And we do it very well. And most of the motors and commercial applications are induction motors.
There are, of course, exceptions. Synchronous motors, the rotor current is supplied in a variety of ways, but it’s not by induction. And on the synchronous motor the rotor turns in sync with the state of frequency. So, there’s no slip. And that’s important because now we can use these motors typically in a variety of ways, but for very small horsepower synchronous motors are used for precision control or timing.
In the past, schools had analog clocks on the wall. And if you ever wondered how they got all those clocks to read the same, it was through little synchronous motor and they tied them all together and they managed the frequency and then they could adjust all the clocks to read the same thing. Synchronous motors of any significant size typically have a higher first cost, which is why we don’t see a lot of them. They’re more energy-efficient, however, so if we stop and think about the total cost of ownership, maybe we can overcome that first cost and use the synchronous motor. The big advantage is they’re designed to operate between unity power factor and a leading power factor. This is an opposite to an induction motor which we can take advantage of and we’ll talk about that moving forward.

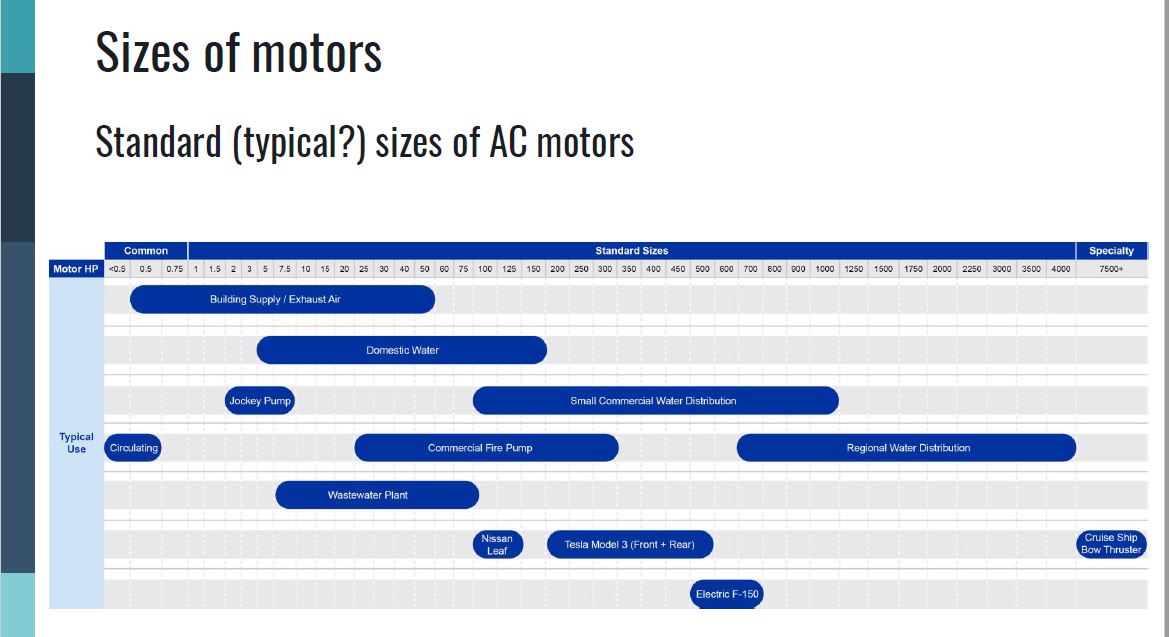
Motor sizing
Figure 1 shows a spectrum of the sizes of motors we see in the world. And this is not meant to be inclusive at all, but it just kind of gives us a feel for the sizes and what they do. If we start at the far left-hand side in a commercial building with a water system or exhaust fan system, we’ll see very small motors just used to circulate water, exhaust fans in restrooms, they can be sub-half horsepower, half horsepower, below one horsepower. And then as we move to the right, we see the things we typically run into. We see supply fans and exhaust fans. We see domestic water pumps, a jockey pump on a fire pump system, the fire pump system itself. As we move more to the right, we see small commercial water distribution.
Anybody who’s ever had to replace a motor on an old piece of equipment has run into this. You get the new motor, you get it out of the box, you take the old one off the air handler, you put the new motor up there and all the holes are gone. What do we do? How do we deal with this?
Fortunately, in 1926, an organization called National Electrical Manufacturers Association was created. And what NEMA does is they try to standardize all of this stuff. They don’t like to use the word standard, but they really do develop standards. They are not an enforcement agency. They have no direct control over any manufacturer but what they do is they help the manufacturers make things that are interchangeable and they help the manufacturers rate things in a way that makes it easier for us engineers to figure out which one of the many hundreds of choices we want.
Frame size basically ensures the holes are in the right place. If you get a NEMA frame size, pick your favorite one A, it’s going to fit any other NEMA frame size A. A horsepower may not be the same. It may be induction. It may be synchronous. It doesn’t matter as long as the frame size matches the holes will be in the right place.
Next, we have motor classes. This one’s a little bit more important for us when we’re specifying new equipment. There are currently five classes and they’re based on starting torque and the ability to accelerate loads. Sometimes we don’t care especially in an air handler situation, the starting torque is pretty low and we don’t really care how fast it starts up.
If it takes 30 seconds or a minute, we don’t care because typically in an air handler once it’s running, it’s running. There are currently five classes because as the industry changes, NEMA changes with the industry and adds classes as necessary. Class A extremely high efficiency, extremely high full load speed, they’re very rare. Motor class B is more typical. Normal torque motors, low starting torque typically on pumps and fans. It’s not a huge locked rotor current type situation. C and D are much higher starting toque, positive displacement pumps or compressors. Air compressors starts against in most cases. It starts against a higher back pressure large pumps where you have big head differential. The pump is going to take a little bit more torque to get started.
You may use the motors class C or D. This is a larger pump driving a water, a larger motor driving a water pump and a water plant. And then there’s E, which is the high efficiency version of B. And this would just be something where if we wanted to look at total cost of ownership, save a few more dollars down the road by spending a little more upfront we might consider a motor class E instead of B.
For more about motors, learn about them here.