Selection of the right load-sharing control system depends on the sizes of the generators, their governors and voltage regulators, the sensitivity of the loads to voltage and frequency, and desired system reliability.
There are a number of reasons for paralleling generator sets, including redundancy, ease of maintenance, load management, and speed of load acquisition. However, once you have a paralleled emergency generator system, the challenge is how to make sure that each of the generators carries its portion of the total load on the system.
Following are several of the more common systems for load apportioning and their operating characteristics. The engineer must evaluate their particular installation to determine how sensitive their critical loads are to voltage and frequency variation, how often the loads start and stop, and whether the generators are perfectly matched, so that he can select the appropriate control system.
Proportional control of the loads on a group of paralleled generators is key to smooth, trouble-free operation, whether for standby or prime-power applications. Control schemes that are commonly used to achieve load sharing are the:
• Droop control system
• Isochronous control system
• Reactive droop compensation system
• Cross-current compensation system.
Each of these systems has pros and cons for simplicity and operational characteristics, and when engineering a generator paralleling system, the engineer must carefully consider these characteristics so that the system provides power that is suitable for the connected loads.
Load sharing history
Historically, load sharing on paralleled generators was not a big issue, because the generators were, typically, the same full-load capacity, the same governor, the same operating characteristics—pretty much identical units. As long as the mechanical governors were calibrated so the same load change would result in the same throttle position adjustment, the generators would share loads equally.
As the systems transitioned to electronic controls and those became more sophisticated, load sharing became possible with differing generator sizes and, in some cases, different control components. As early as 1984, control systems were available that would allow varying sized generators that were remotely located from one another, to parallel to a common bus.
Load sharing today
With the microprocessor-based control systems, the four aforementioned control schemes provide load sharing, voltage regulation, and frequency control. The simplest system is the droop control system, in which the voltage and/or frequency drops as the load increases (Figure 1). With this system, there is no requirement for the components of the engine or alternator to be of the same type, so paralleling generators of differing sizes and manufacturers is straightforward.
The droop system is considered to be more reliable than other systems due to its simplicity, but the price of this reliability is the loss in power quality. As noted, with an increase in load, the voltage and frequency both drop, so loads that require a constant frequency or a power source with a relatively constant voltage output will have functional difficulties. For the typical induction motor loads, a droop controlled generator system will work very well, since voltage and frequency tolerance is relatively wide.
Some users with droop control systems in prime power applications will have an operator constantly adjust the fuel injection quantity so that the generator speed may be adjusted to compensate for the changes in load. The system works best when a single control adjusts all of the engines simultaneously. Otherwise, the generators cease load sharing and there is a possibility of reverse power conditions on the lagging generators.
Isochronous control system
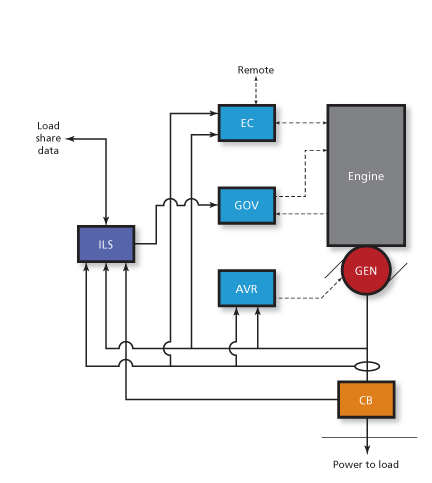
In contrast to droop control, the isochronous system maintains a constant engine speed with either a constant or varying load. Thus the frequency and voltage of the system remains constant, providing much higher power quality than that of the droop control system. As with the droop control system, the generator sizes and controls may vary in manufacturer and will still load share. To permit each generator to carry its proportion of the total load, an isochronous load sharing control (ILS) will sample the voltage and current information from each generator. With this information from each of the generator sets, the ILS can calculate correction signals for each generator governor and adjust the fuel rate, which allows proportioning the total load to each generator, according to its capability (Figure 2).
In contrast to the generator size and manufacturer variations, the communications network must typically use the same governors, the same load sharing controls, and even the same model of communications interface. This is due to the lack of industry standards for the communications systems so that when the ILS interfaces with each generator via this network, every component must match.
Reactive load sharing
Droop control systems may be designed to mitigate some of the inherent system problems by using a reactive load sharing (RLS) control system. (Also known as reactive droop compensation; Figure 3.) Each generator will have a current transformer that allows the control system to proportion the load provided to the system by each generator. Thus, if the total load on the system is 50% of system capacity, then each generator will supply one-half of its respective full load current to the system.
The RLS still has a wider voltage regulation range than an individual isochronous generator because the individual generator will be in the 1% range for voltage regulation while the RLS may be as high as 4%. Since the voltage regulation is measured from no load to full load, the system load will have a droop closer to 2% (with 50% loading).
Cross-current compensation
To improve the generator system voltage regulation, the RLS may be modified to a control system referred to as cross-current compensation (CCC). With CCC, changes in the load do not affect the steady state voltage, which dramatically improves the system voltage regulation. (Figure 4)
For the CCC system to operate properly, all of the voltage regulators must be the same because the load feedback from one generator adjusts the speed of another unit, not the unit from which the feedback is derived (which results in calling it a cross-current system).
In conclusion, selection of the right load-sharing control system depends on the sizes of the generators, their governors and voltage regulators, the sensitivity of the loads to voltage and frequency, and desired system reliability. The engineer must consider all of these factors during the design and specification process. This will assure that the system will operate correctly, provide the necessary voltage and frequency stability, and have the generators share their proportion of the total load.
A problematic paralleling application
For the typical applications, paralleling various sized generators from various manufacturers will function just fine for virtually all operating situations. However, there is one situation in which operating problems could result in tripping a generator off-line.
The ILS can control multiple generators of various sizes and get them to power their proportionate share of the total load, even when the generators operate at different speeds, i.e., 900, 1,200, or 1,800 rpm. The problem arises when you have a large, slow-speed generator, such as a 900 or 1,200 rpm unit in a 1 to 2 MW size, paralleled with a much smaller 1,800 rpm unit rated at, say, 400 kW.
If the two units are synchronized to a common bus, they will proportionately share the applied load as controlled by the ILS. Upon application of a large step load, the ILS will direct each of the units to increase (or decrease, if the step load is a reduction instead of an addition) its fuel supply to maintain voltage and frequency. Because the smaller generator is much more responsive than the larger unit, it will increase or decrease its fuel supply and, thus, its relative speed faster than the larger unit.
If, for instance, the step load is an added load, the increased fuel supply will tend to increase the rotational speed of the smaller generator and, under worst case conditions, will cause a frequency instability on the synchronization of the two units. Due to this change in frequency and, subsequently, voltage, the larger unit could see a reverse power flow as the smaller unit’s voltage rises in response to the load increase.
The result could be threefold:
1. The over-frequency sensor of the smaller generator could open the contactor in the paralleling equipment, dropping this unit off-line.
2. If the frequency sensor of the smaller generator determines that the change in frequency is dramatic enough, it could trip the generator breaker of the smaller unit, requiring that the breaker be manually reset before the generator could be brought back online.
3. The reverse power relay on the larger generator could determine that there was an abnormal power flow and trip the main breaker for this generator off-line, again requiring that the breaker be manually reset before reparalleling the unit to the bus.
Therefore, for applications where there are multiple generators of varying sizes and differing speeds, the design engineer must be very careful in designing a paralleling system for these generators. In particular, for systems will the potential for significant step loads on the paralleling bus, it is recommended that an alternative design be considered that does not include paralleling these generators because the possible consequences could be dire.
The 10-second rule
Ancillary to sharing load, one of the challenges of an emergency system design is to meet the 10-second rule and still have a paralleled, redundant emergency power supply. The 10-second rule is a code requirement that life safety and selected critical loads in health care facilities be energized with 10 seconds of a utility power failure.
When designing emergency systems with modern generators below 2,000 kW, the first generator that achieves 90% of its operating voltage will close onto the paralleling bus. When the life safety transfer switch senses the presence of voltage, the design should assure that this transfer switch will immediately transfer, energizing its loads within less than 10 seconds. When the generators are larger, lower speed, or slow starting, meeting the 10-second rule becomes a problem, so some other means must be employed to assure that these critical loads can be energized within the 10 seconds. If the engineer cannot select smaller generators or higher speed engines, one solution could be providing a smaller generator for the critical loads with a backup transfer switch so that redundancy for the smaller generator can be provided from the larger paralleled system.
Lovorn is president of Lovorn Engineering Assocs. and a member of the Consulting-Specifying Engineer editorial advisory board. Divine is project manager and electrical engineer at Smith Seckman Reid Inc.



