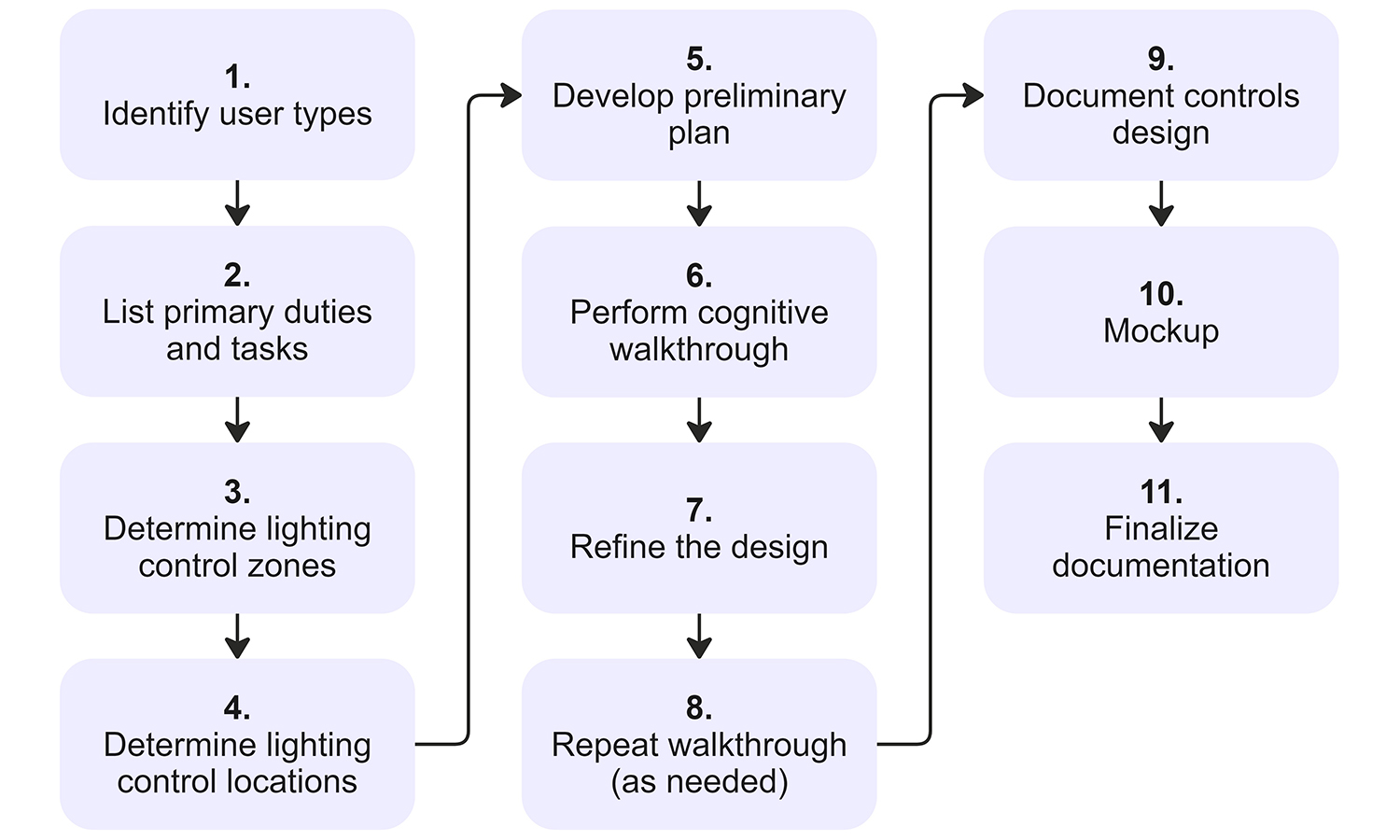
Lighting and Lighting Controls Lighting controls: How to translate requirements into resilient solutions
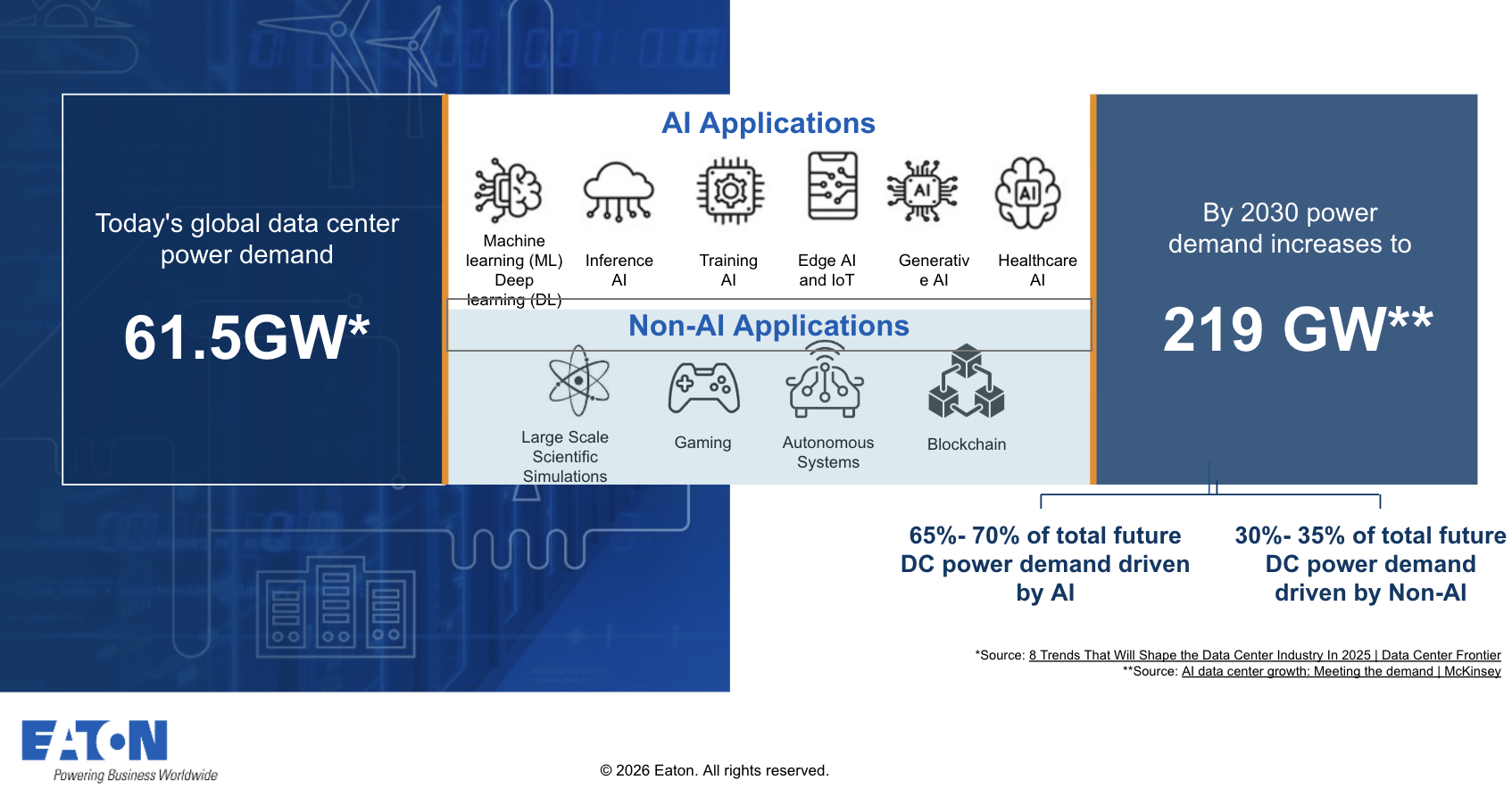
Data Centers Your questions answered: Detecting and Managing Unique Power Quality Challenges in AI Data Centers