MNS, ECS
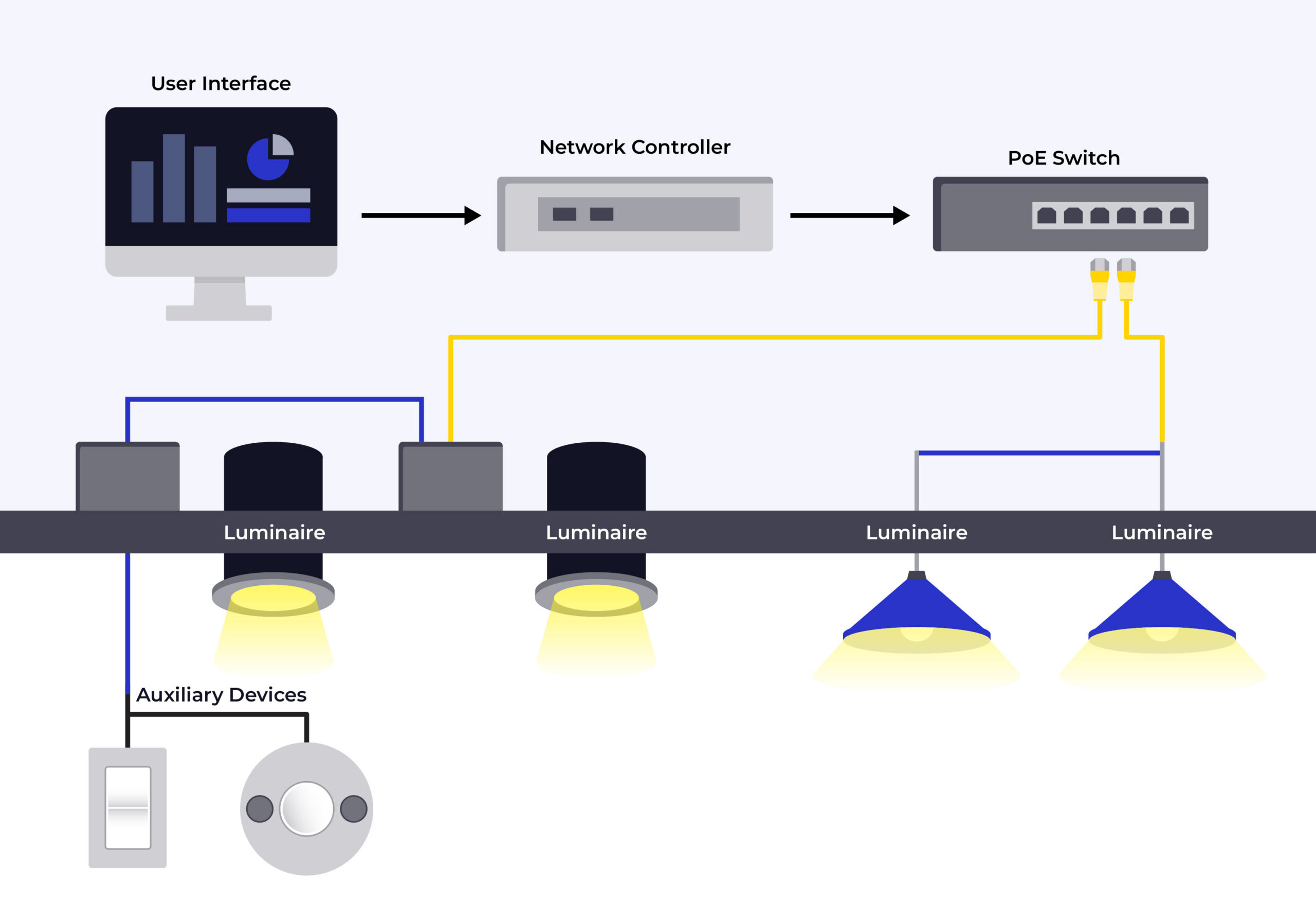
Lighting and Lighting Controls
Fire and Life Safety
Educational Facilities
Sustainability
HVAC/R and Mechanical
Electrical and Power
Codes and Standards
Automation, Controls